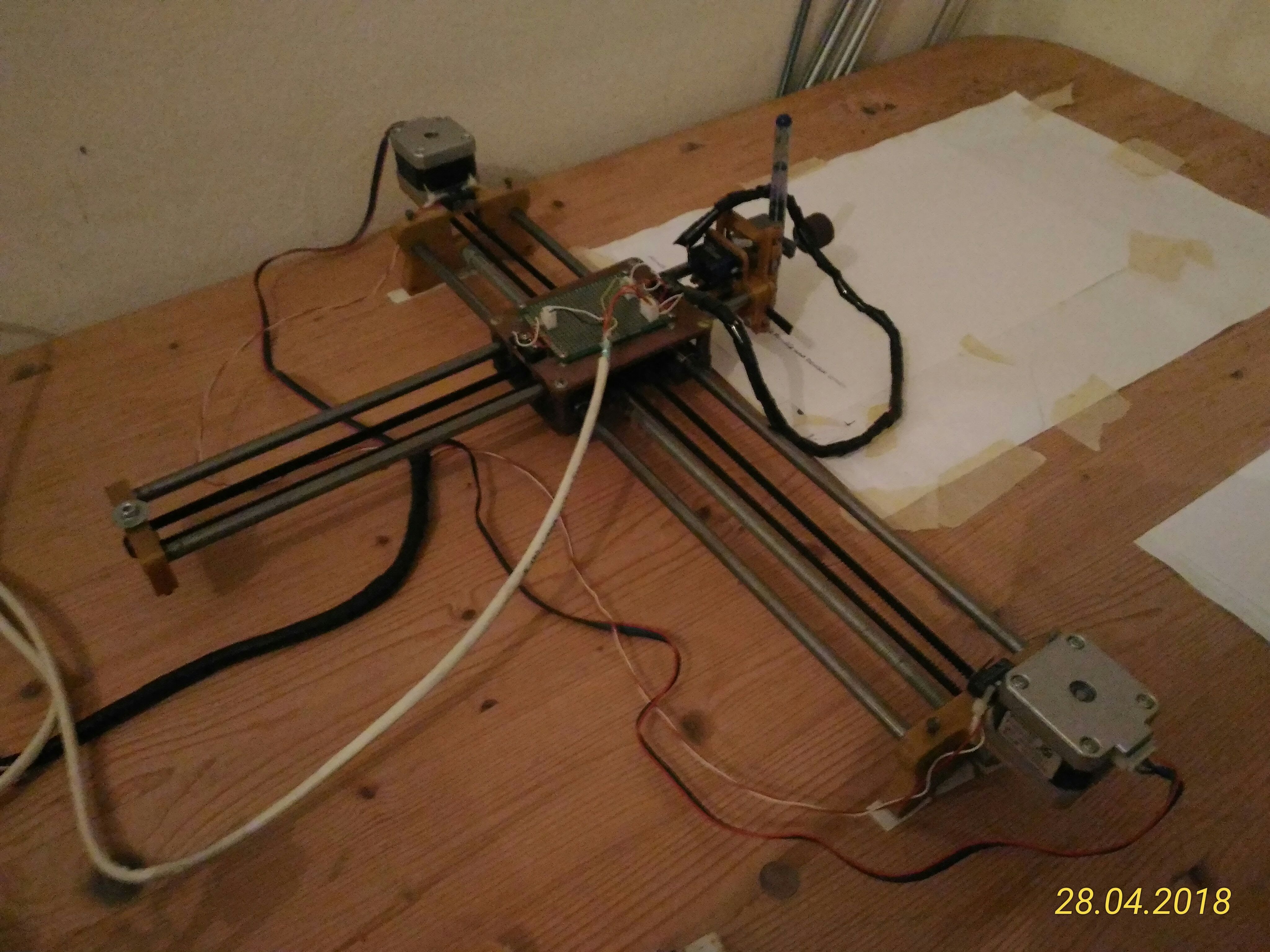
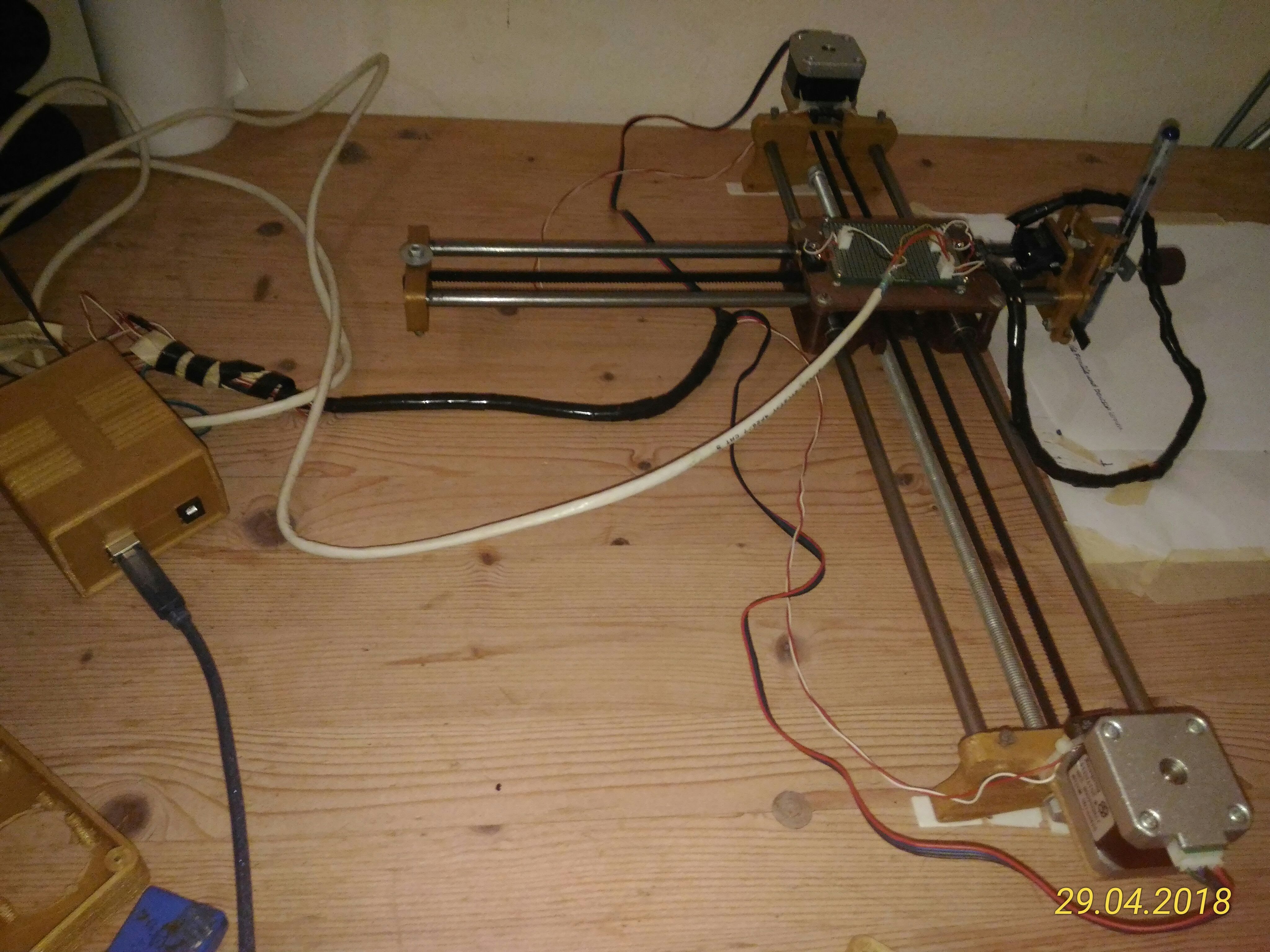
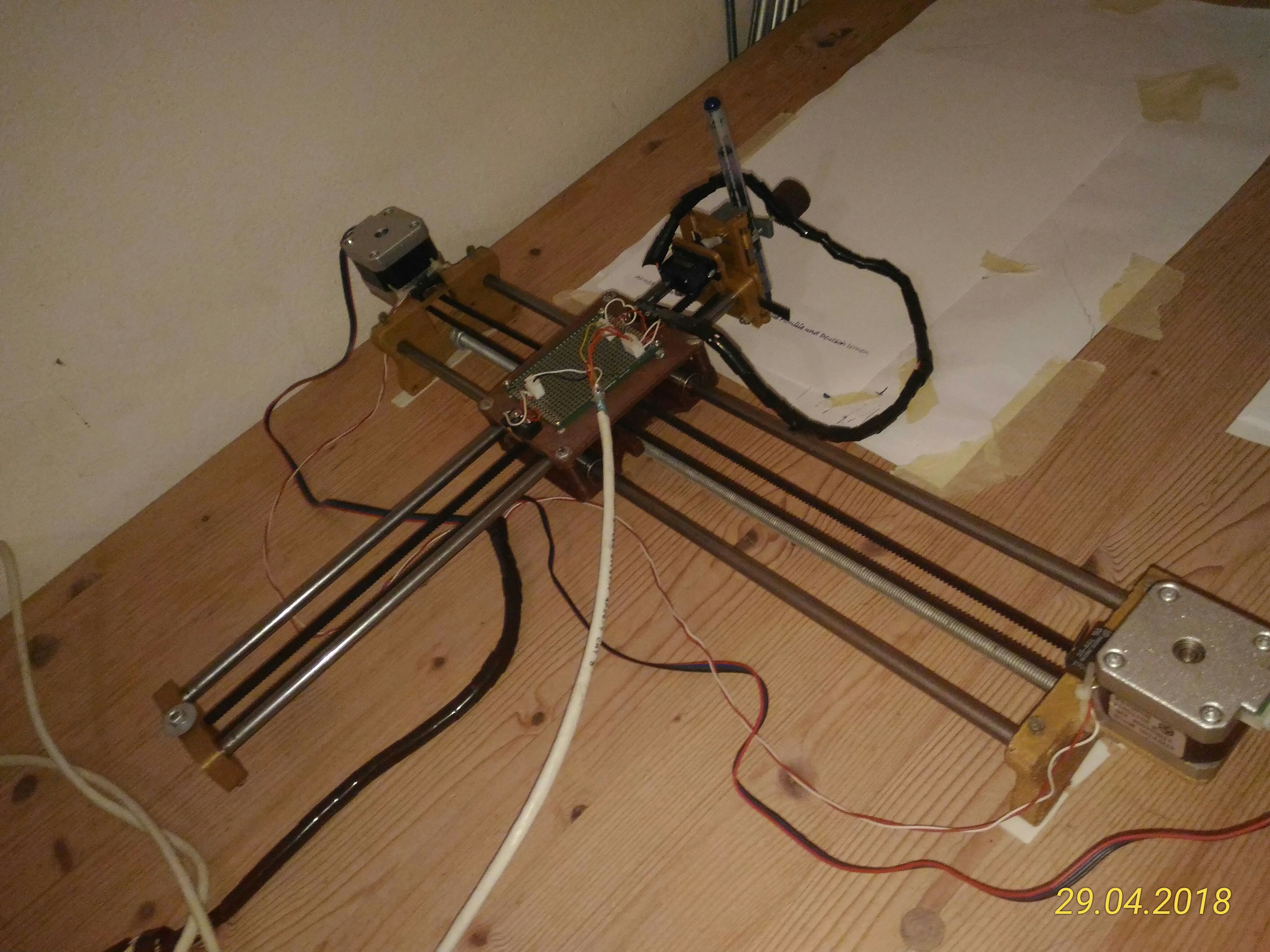

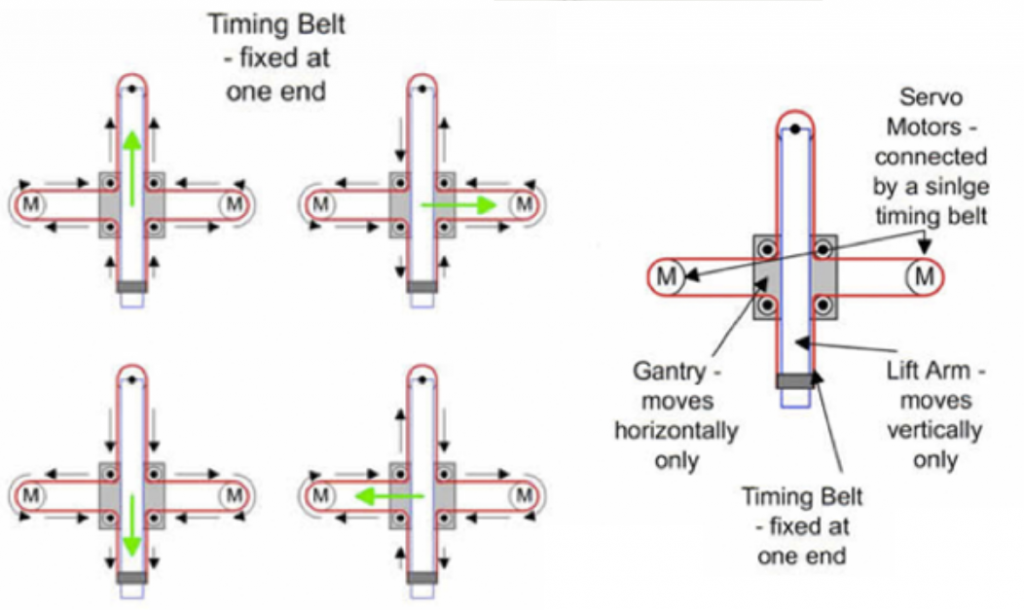
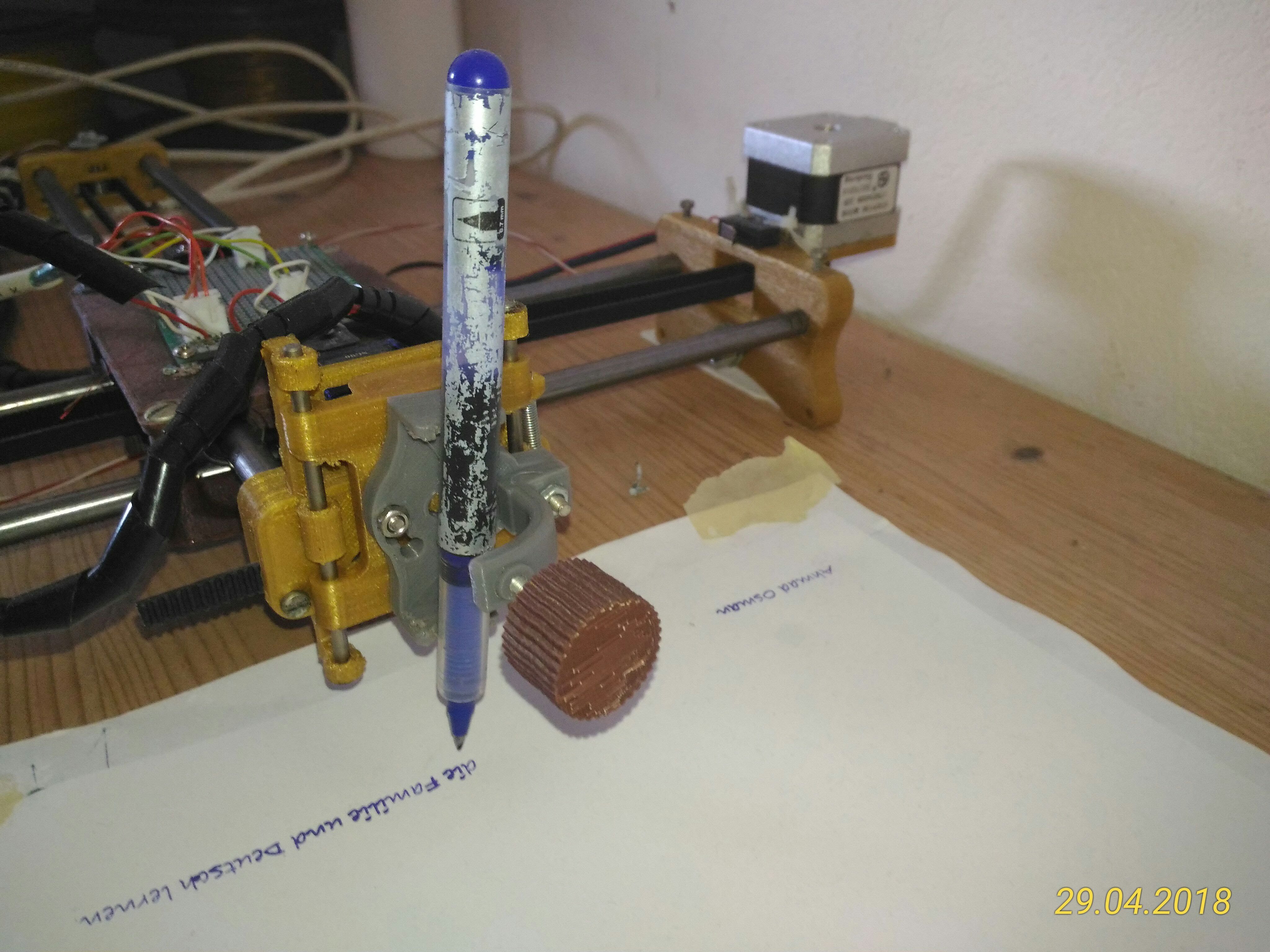

Es ist ein Roboter verwendet eine CNC-Technologie mit einem Stift zum Schreiben oder Zeichnen.
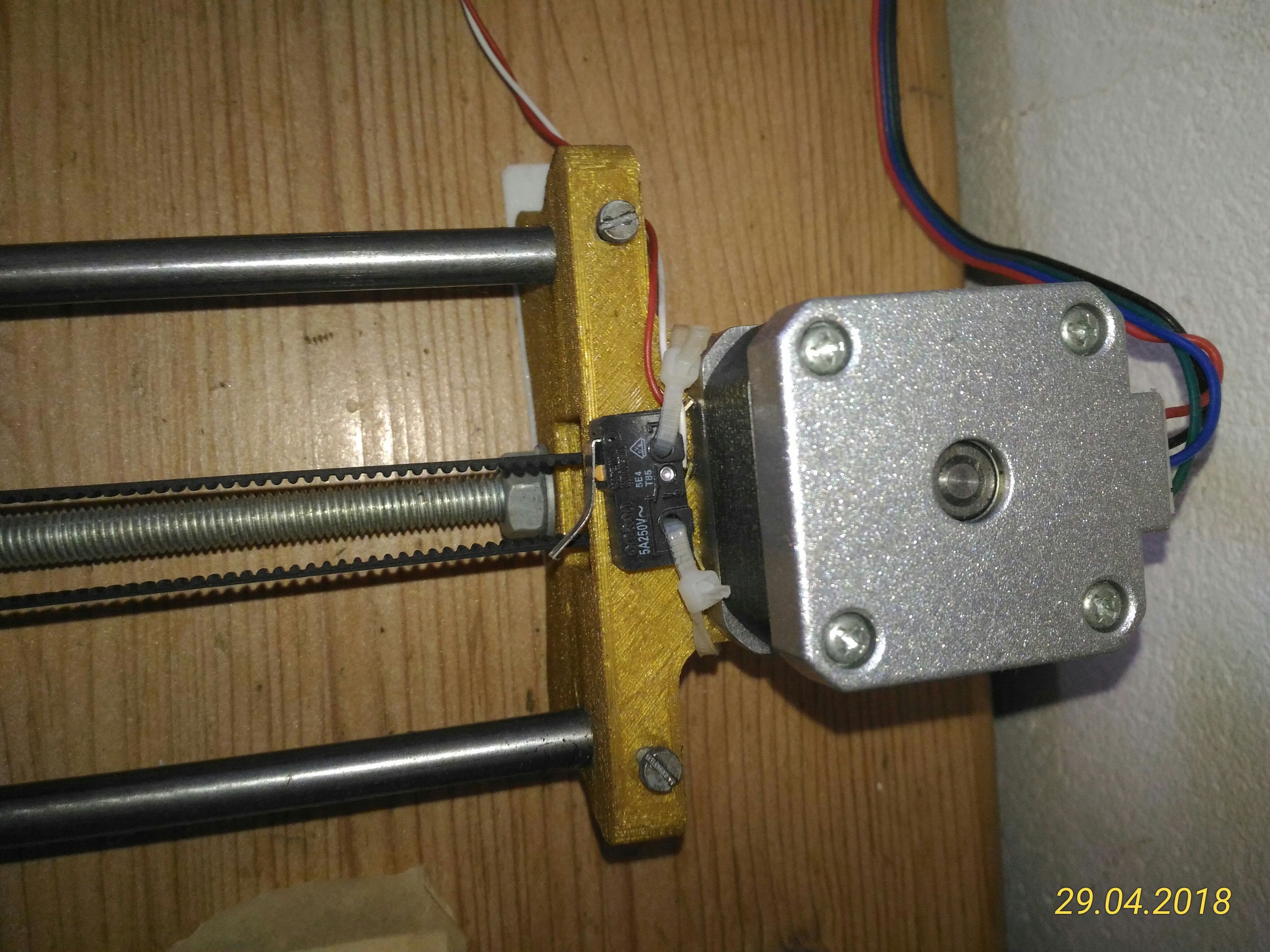
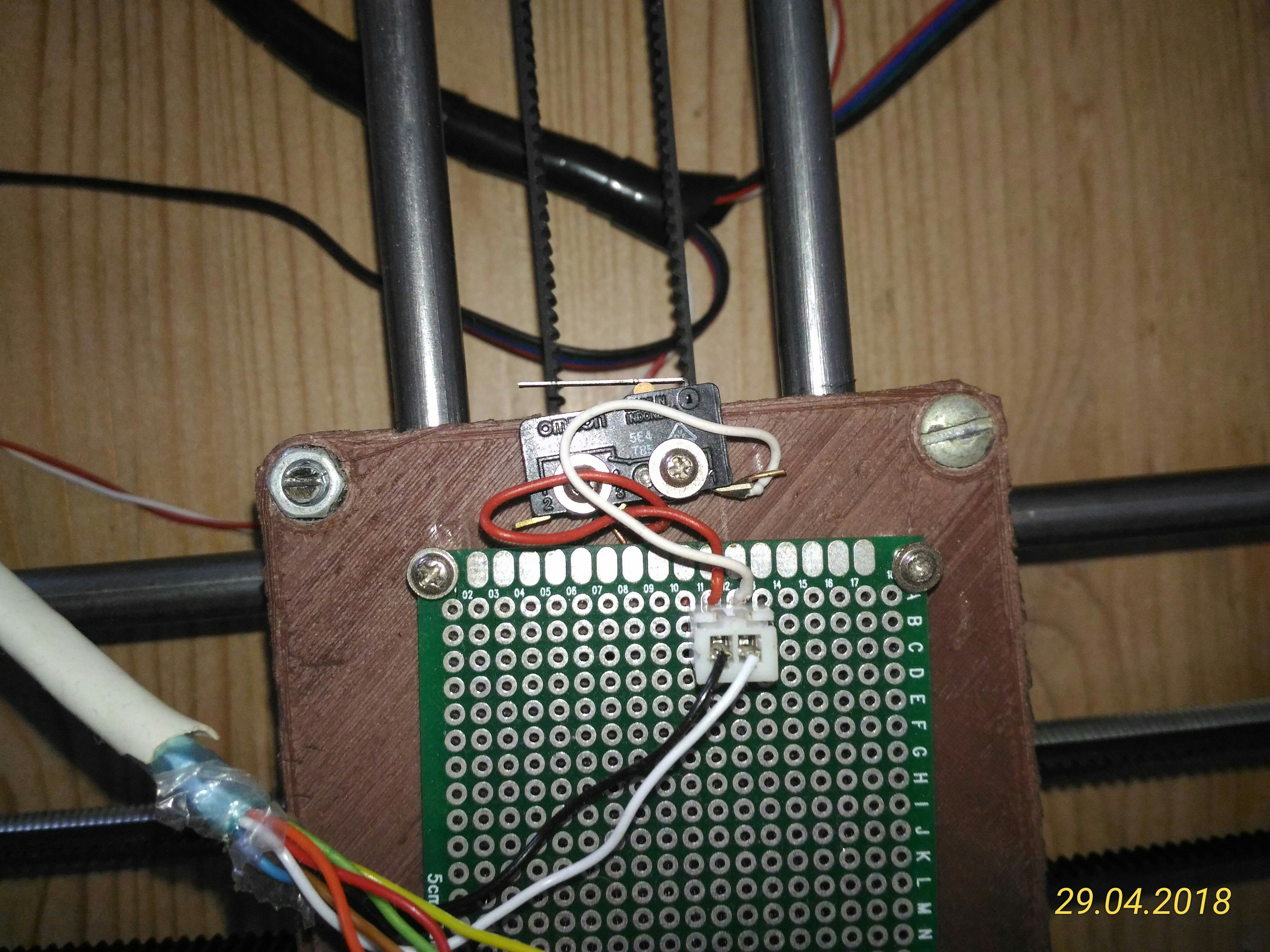
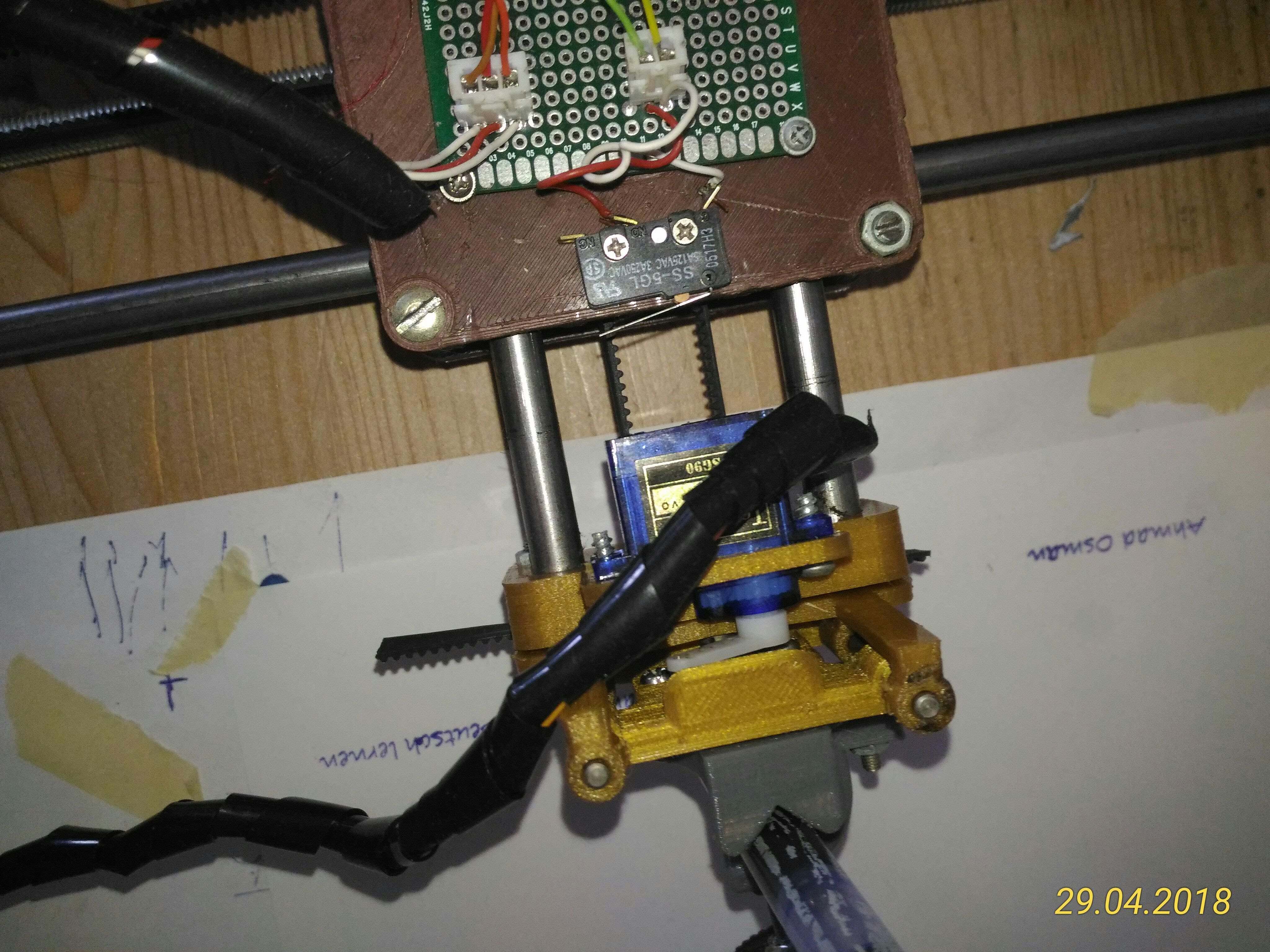
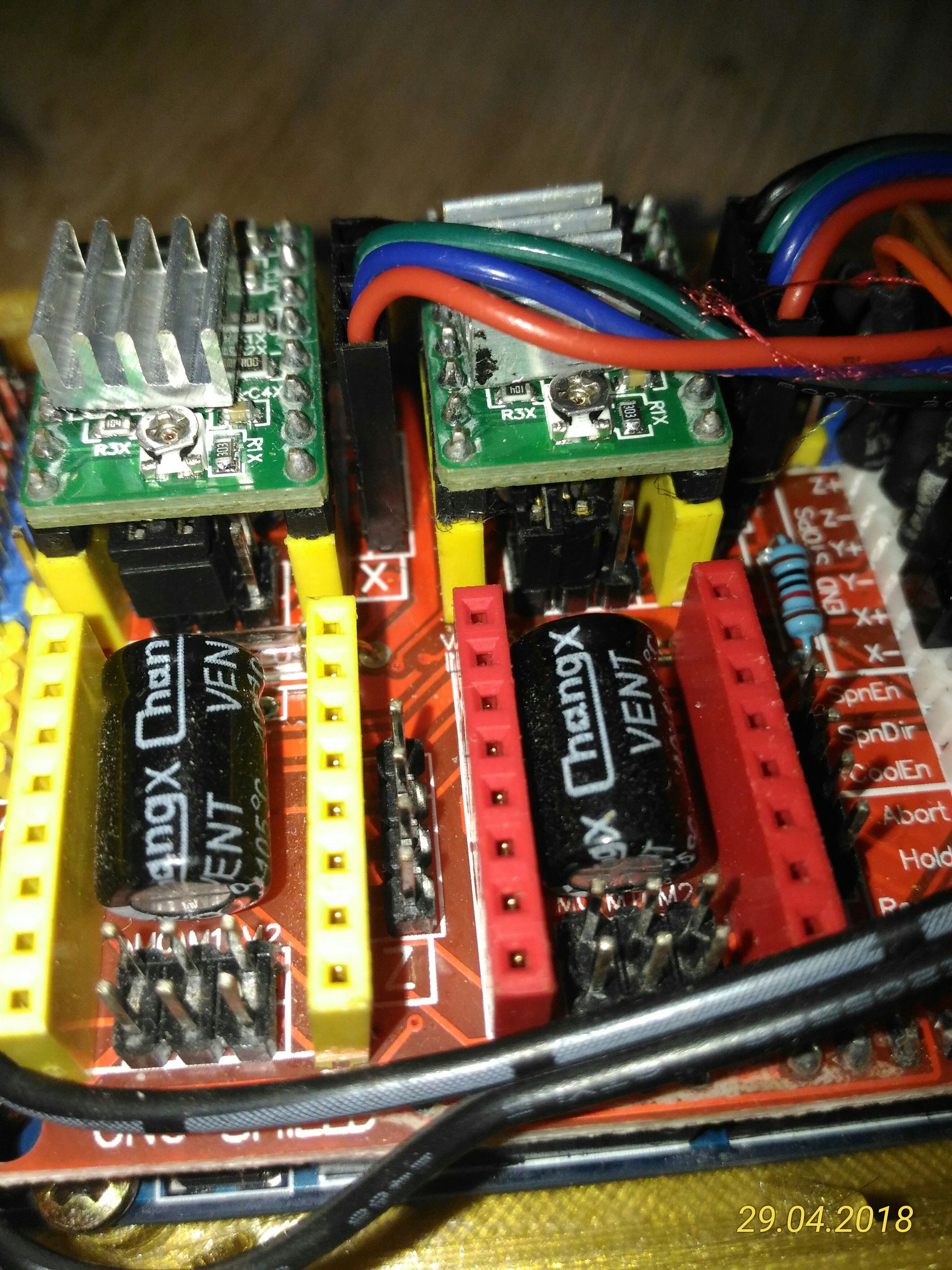
Robot parts
einstellen Informationen
Arduino software setup
Nach der Installation von Arduino Ide (Hier) Sie müssen den Ordner grbl-coreXY-servo-master in den Ordner arduino lib kopieren
document/arduino/libraries/
dann können sie die ino-datei im beispielordner öffnen und die software auf ihr arduino uno board hochladen
Danach müssen Sie die folgenden Befehle mit Arduino-Terminal ausführen (eins nach dem anderen, um sicherzustellen, dass es keine Fehler gibt), um die grbl-Einstellungen festzulegen
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=0 (dir port invert mask:00000000)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=3 (status report mask:00000011)
$11=0.010 (junction deviation, mm)
$12=0.010 (arc tolerance, mm)
$13=0 (report inches, bool)
$20=0 (soft limits, bool)
$21=1 (hard limits, bool)
$22=1 (homing cycle, bool)
$23=3 (homing dir invert mask:00000011)
$24=25.000 (homing feed, mm/min)
$25=500.000 (homing seek, mm/min)
$26=250 (homing debounce, msec)
$27=1.000 (homing pull-off, mm)
$100=80.000 (x, step/mm)
$101=80.000 (y, step/mm)
$102=80.000 (z, step/mm)
$110=5000.000 (x max rate, mm/min)
$111=5000.000 (y max rate, mm/min)
$112=5000.000 (z max rate, mm/min)
$120=10.000 (x accel, mm/sec^2)
$121=10.000 (y accel, mm/sec^2)
$122=10.000 (z accel, mm/sec^2)
$130=435.000 (x max travel, mm)
$131=255.000 (y max travel, mm)
$132=200.000 (z max travel, mm)
jetzt Ihre Arduino uno ist bereit
Inkspace
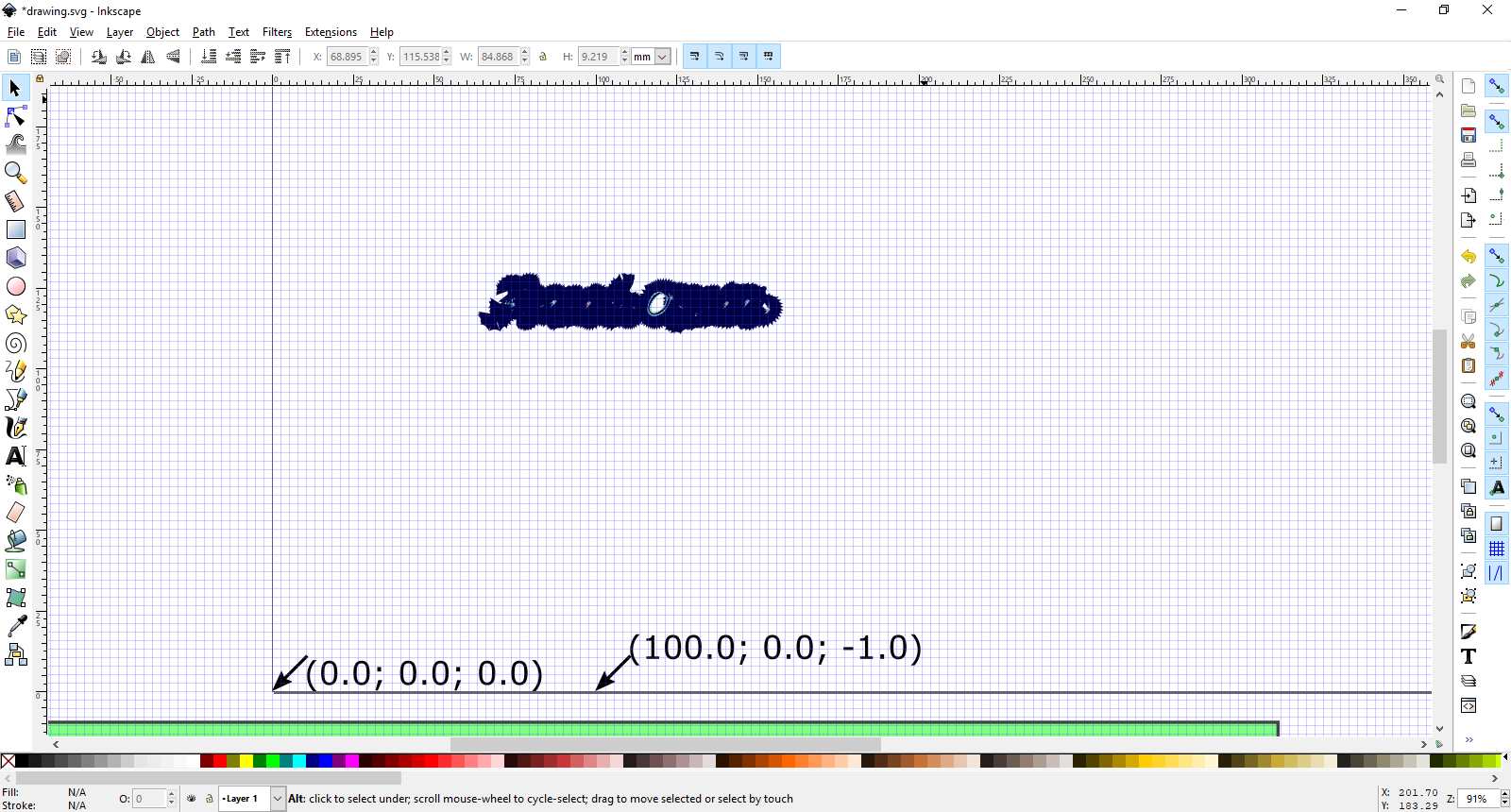
Sie müssen den Tintenspeicher von hier installieren Dann können Sie die Datei draw.svg öffnen, die ein Beispiel und die Einstellung enthält, die Sie benötigen, um eine gcode-Datei zu generieren
Schreibe etwas
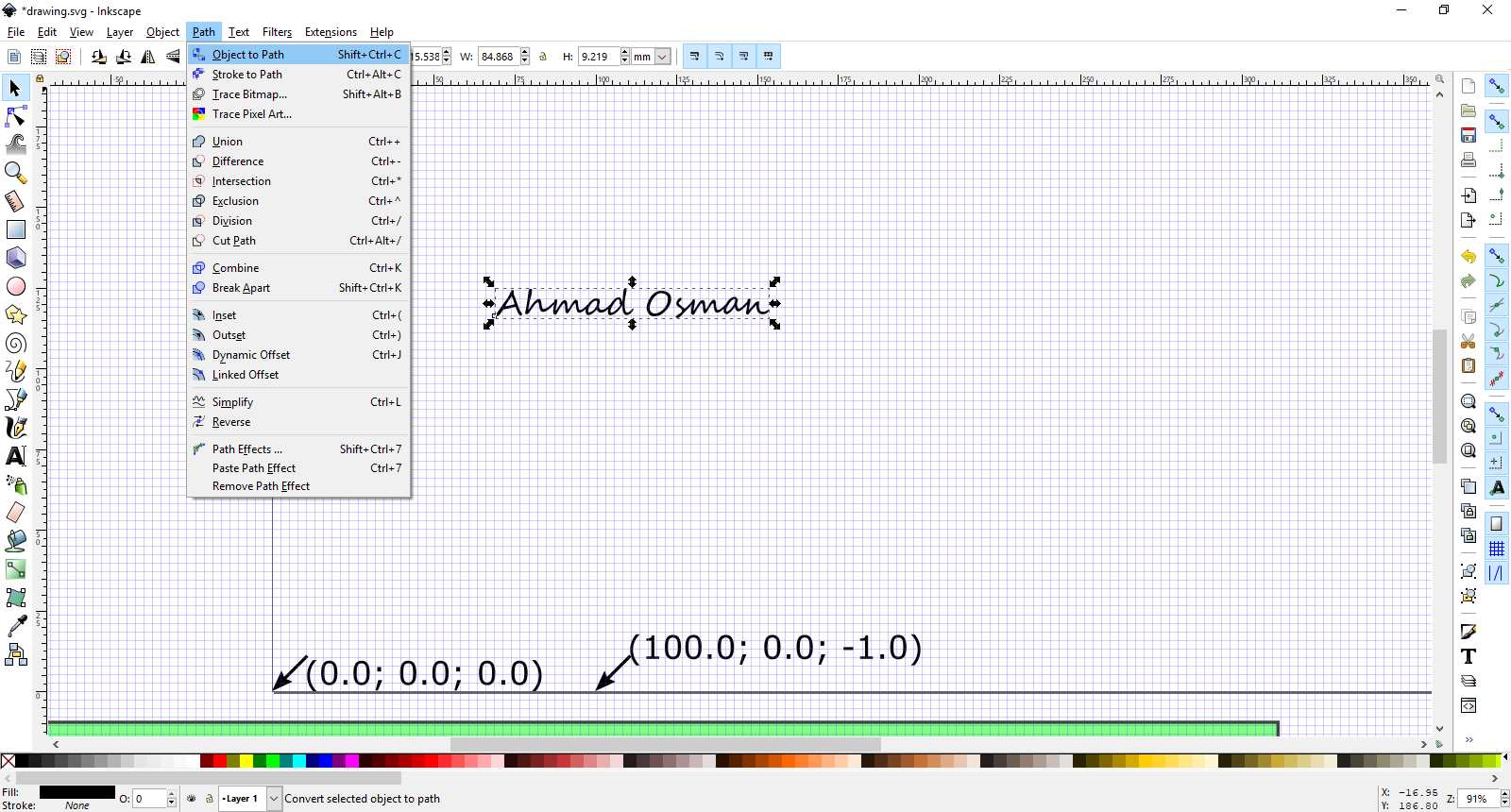
Objekt in Pfad konvertieren
Generiere Gcode
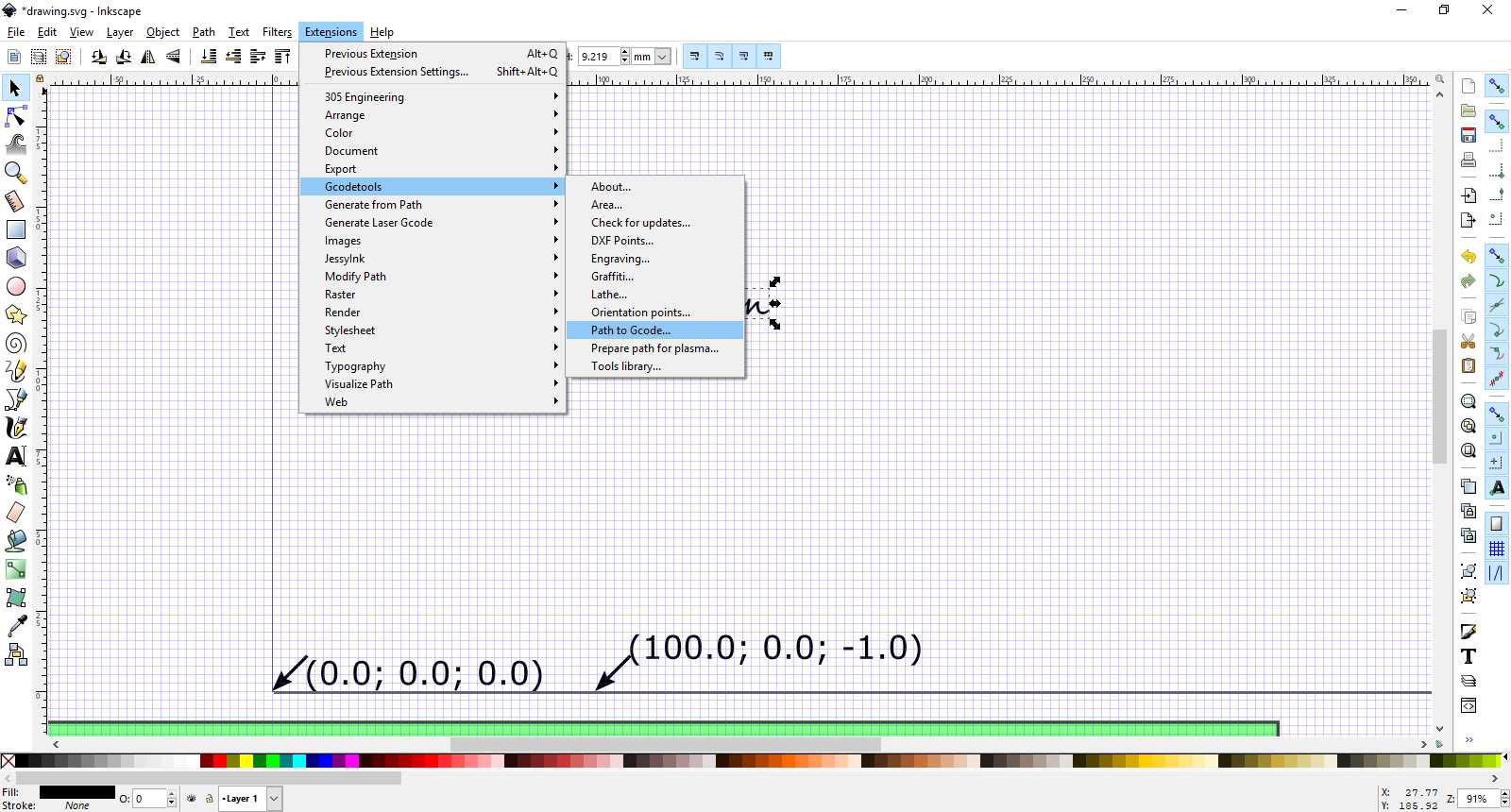
Generate-Gcode Sitzung
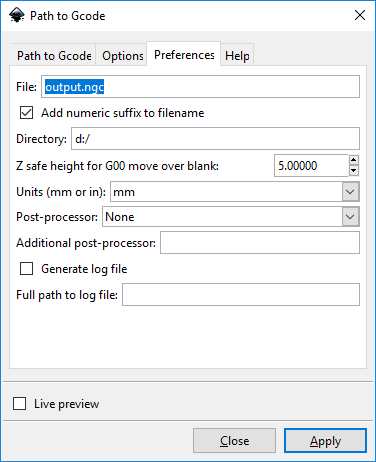
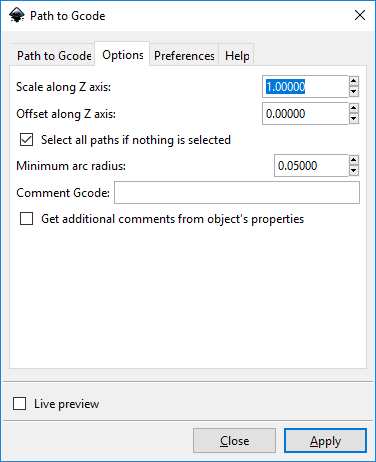

aNach dem Klick auf Apply, dauert es ein paar Sekunden, um eine Gcode-Datei zu generieren und es wird so angezeigt
Sie müssen eine kleine Änderung in der Gcode-Datei vornehmen, nach Zeile 7, schreiben Sie einfach M5, dieser Befehl wird den Stift im ersten Lauf erhöhen
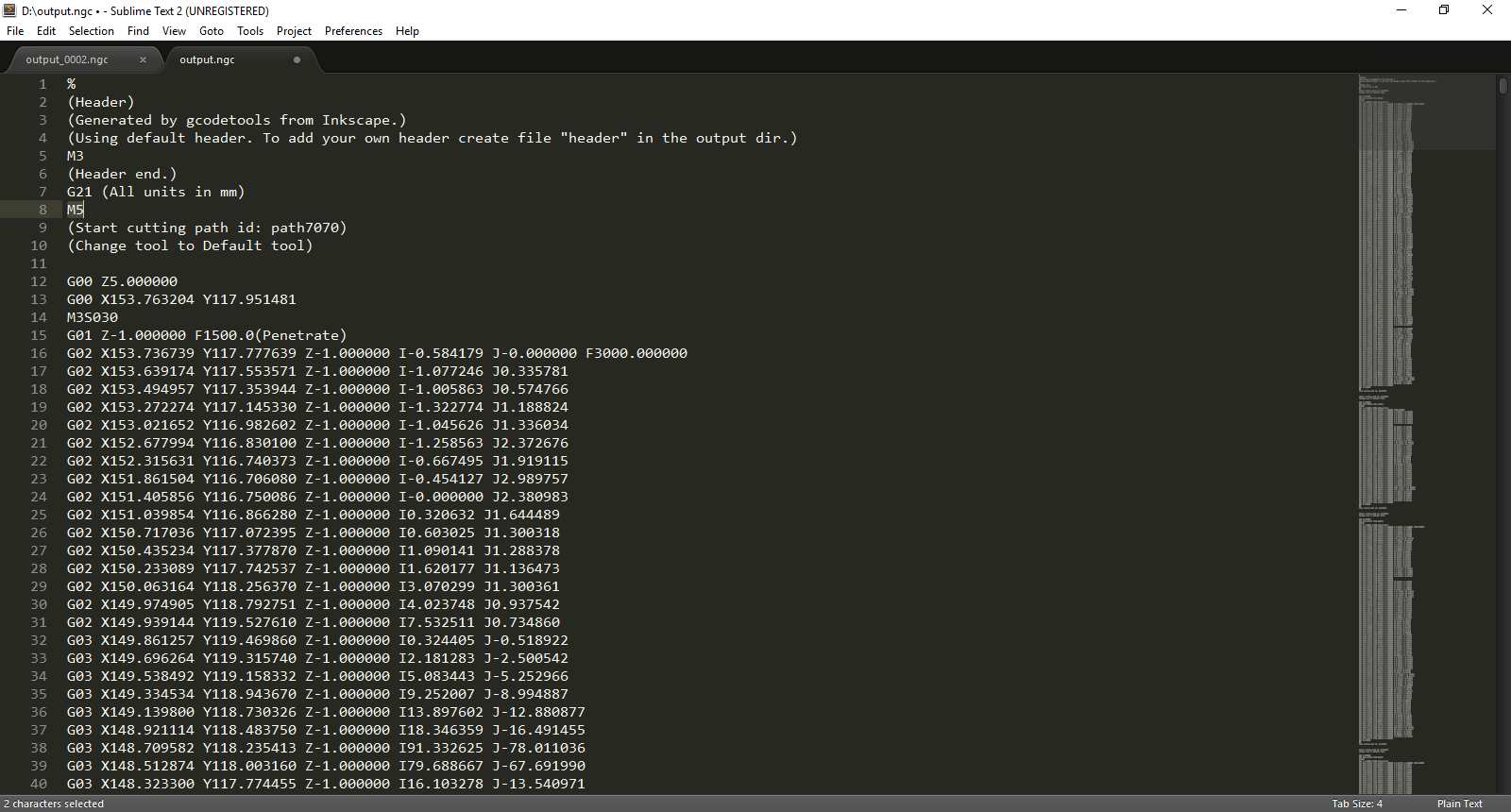
Speichern Sie die Datei, und sie kann jetzt gedruckt werden
Sourcerabbit Einstellungen
Sie müssen Sourcebabbit von hier installieren, Nach dem Öffnen erkennt es automatisch den Port, mit dem Arduino verbunden ist
Sie können den Befehl grbl setting mit Sourcerrabbit ausführen
$$ Befehl zum Überprüfen grbl Einstellung sind die gleichen mit der letzten Sitzung, hier sind einige nützliche Befehle
$$ (Rückkehr grbl Sitzungen)
$H (Maschine auf 0,0 Punkt zurücksetzen )
M5 (setze den Stift nach üpen)
M3S030 (setze den Stift nach unten)
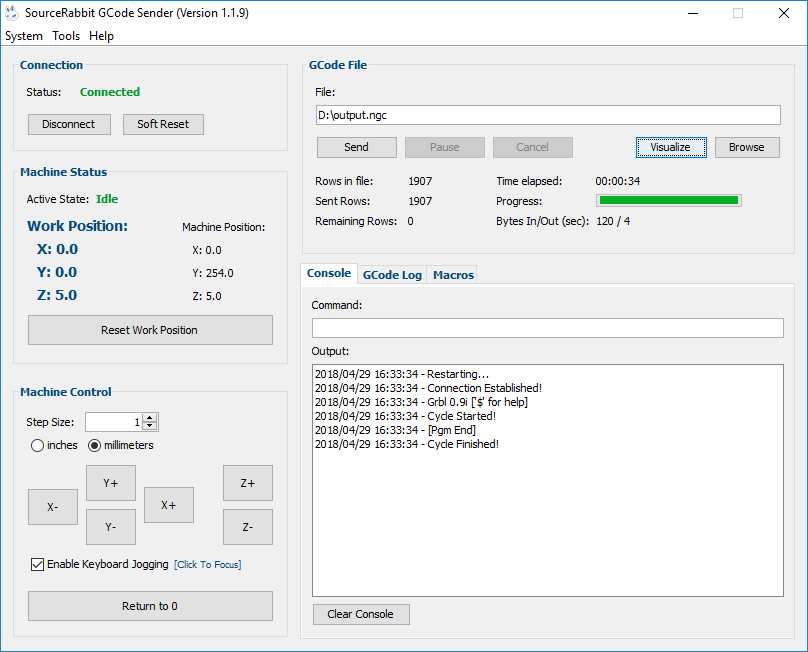
Wählen Sie einfach die Gcode-Datei und senden Sie es an die Maschine und ENJOY
Fügen Sie Ihren Kommentar hinzu